庫卡機器人作為工業機器人領域的領先品牌之一,以其卓越的性能、高精度和可靠的設計著稱。其中,傳動系統和布局設計是實現機器人高效運作的核心要素。本文將從這兩個方面展開分析。
一、傳動系統設計
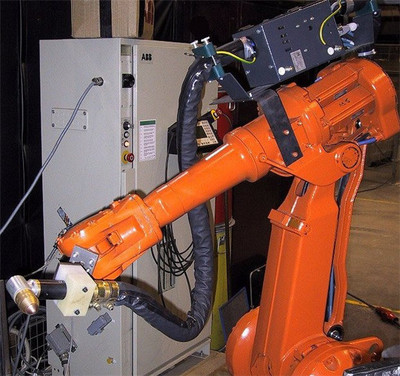
庫卡機器人的傳動系統主要采用精密的伺服電機與減速器組合,確保高扭矩輸出和精準定位。常見的傳動方式包括齒輪傳動、同步帶傳動以及直接驅動技術。其中,減速器多使用諧波減速器或RV減速器,這些減速器具有高剛性、低背隙和長壽命的特點,適用于高速、高負載的工業應用。例如,庫碼機器人的關節模塊通常采用模塊化設計,集成伺服電機和減速器,便于維護和更換。傳動系統還配備了高分辨率編碼器,實現閉環控制,進一步提升運動精度和重復定位精度。
二、布局設計分析
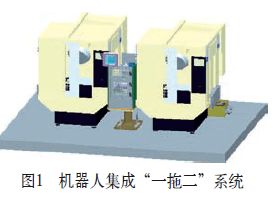
庫卡機器人的布局設計注重靈活性、空間利用和安全性。常見的布局包括關節型、SCARA型和直角坐標型等,其中關節型機器人(如庫卡KR系列)采用多軸串聯結構,具有較大的工作空間和自由度,適用于焊接、搬運和裝配等復雜任務。布局設計中,庫卡優化了機器人的臂長和關節角度,以減少運動慣性和振動,同時采用輕量化材料(如鋁合金和碳纖維)來提升動態性能。在工業應用中,布局還考慮了與其他設備的集成,例如通過模塊化底座和接口,實現快速安裝和生產線協同。安全方面,庫卡機器人內置碰撞檢測和緊急停止功能,布局設計確保操作員與機器人保持安全距離。
庫卡機器人的傳動系統通過先進的電機和減速技術實現高精度運動,而布局設計則兼顧了靈活性、效率和安全性。這些設計特點使庫卡機器人在汽車制造、電子裝配和物流等領域廣泛應用,并持續推動工業自動化的進步。隨著智能化和協作機器人技術的發展,庫卡有望進一步優化傳動與布局,提升機器人的自適應能力和人機協作效率。