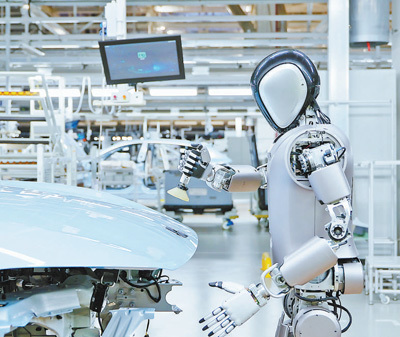
在廣東佛山一家現(xiàn)代化工廠的車間里,一場特殊的“實訓(xùn)”正在進行。數(shù)臺身高約1.6米、擁有靈活雙臂與視覺系統(tǒng)的人形機器人,正跟隨工程師的指令,學(xué)習(xí)識別不同型號的汽車零部件,嘗試進行精細的裝配操作。這是中國工業(yè)機器人領(lǐng)域一次引人注目的前沿探索——讓人形機器人走進真實生產(chǎn)線,開啟從實驗室到工業(yè)場景的“適應(yīng)性訓(xùn)練”。
隨著人工智能、傳感器與驅(qū)動技術(shù)的突破,人形機器人逐漸從科幻走進現(xiàn)實。與傳統(tǒng)的機械臂、AGV小車等專用工業(yè)機器人不同,人形機器人憑借類人的形態(tài)與多自由度關(guān)節(jié),理論上能適應(yīng)更復(fù)雜、非結(jié)構(gòu)化的環(huán)境,使用人類已有的工具與設(shè)施,完成多樣化的任務(wù)。中國作為全球最大的工業(yè)機器人市場與應(yīng)用國,正積極布局這一未來產(chǎn)業(yè),推動人形機器人在工業(yè)場景的落地“實訓(xùn)”。
“進廠實訓(xùn)”的核心目標是解決“適應(yīng)性問題”。當(dāng)前,多數(shù)工業(yè)機器人在結(jié)構(gòu)化環(huán)境中表現(xiàn)卓越,但面對產(chǎn)線調(diào)整、多品種小批量生產(chǎn)等柔性制造需求時,往往需要重新編程或調(diào)整硬件。人形機器人通過“實訓(xùn)”,學(xué)習(xí)模仿人類工人的操作邏輯與環(huán)境交互能力。例如,通過視覺與力覺反饋學(xué)習(xí)擰螺絲的力度與角度,通過步態(tài)規(guī)劃在不平整的地面穩(wěn)定移動搬運物料,甚至通過多機協(xié)作完成大型部件的對接。每一次成功的抓取、每一次精準的放置,都在積累數(shù)據(jù),優(yōu)化算法,讓人形機器人變得更“熟練”。
中國的科技企業(yè)、高校與制造業(yè)企業(yè)正形成合力,加速這一進程。例如,一些團隊開發(fā)了“仿真到現(xiàn)實”的訓(xùn)練體系,先在虛擬環(huán)境中讓人形機器人進行海量任務(wù)訓(xùn)練,再遷移到實體機器人進行實地調(diào)試。在汽車制造、電子裝配、物流分揀等場景,已出現(xiàn)試點應(yīng)用。政策層面,《“機器人+”應(yīng)用行動實施方案》等文件明確提出,鼓勵開展人形機器人創(chuàng)新應(yīng)用,探索在特種、制造、民生等領(lǐng)域的融合場景。
挑戰(zhàn)依然存在。人形機器人的成本、續(xù)航、運動控制的精確性與可靠性仍需提升,復(fù)雜決策能力遠不及人類。工業(yè)環(huán)境的安全標準、人機協(xié)作的規(guī)范也需同步完善。但“進廠實訓(xùn)”的方向清晰:不是要完全替代人類,而是作為補充,承擔(dān)重復(fù)、繁重或高危的工作,讓人能從單調(diào)勞動中解放,轉(zhuǎn)向更具創(chuàng)造性的崗位。
記錄中國工業(yè)機器人的這一新篇章,我們看到的是技術(shù)創(chuàng)新與產(chǎn)業(yè)升級的雙重驅(qū)動。從龐大的機械臂方陣到逐漸“擬人化”的智能體,機器人的形態(tài)在變,但核心目標未變:提升生產(chǎn)效率,賦能智能制造。人形機器人的“實訓(xùn)”之路,正是中國制造業(yè)向柔性化、智能化縱深發(fā)展的一個縮影。隨著技術(shù)迭代與場景深化,這些在車間里勤學(xué)苦練的“鋼鐵學(xué)徒”,或?qū)⒊蔀橹袊窃炀€上的一道新風(fēng)景。